JAXA tests PickNik's MoveIt Pro software in multi-armed robotic system for the ISS - The Robot Report
Source: roboticsbusinessreview
Author: @therobotreport
Published: 7/9/2025
To read the full content, please visit the original article.
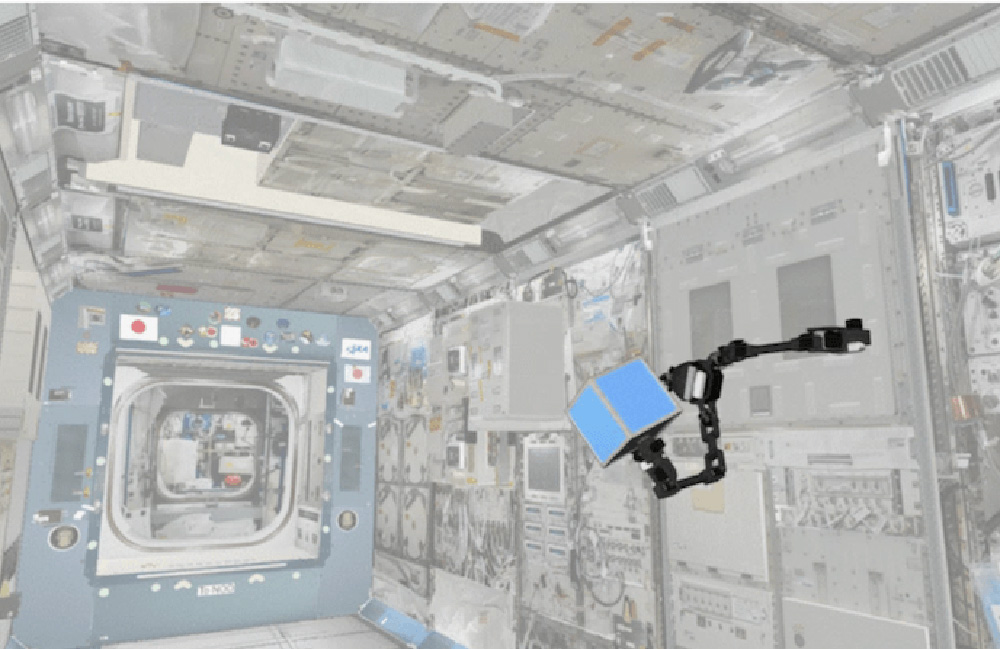
Read original articlePickNik Robotics partnered with the Japan Aerospace Exploration Agency (JAXA) to test MoveIt Pro software as the planning and control backbone for JAXA’s multi-armed robotic system under the Payload Organization and Transportation Robotic System (PORTRS) initiative. The goal was to demonstrate a complex robotic system capable of performing manipulation tasks in microgravity aboard the International Space Station (ISS), such as crawling, payload swapping, and handling flexible cargo transfer bags. These tasks, often routine maintenance or cargo handling, are time-consuming for astronauts whose time is extremely costly—up to $200,000 per hour—highlighting the significant return on investment in robotic assistance to augment astronauts and free them for higher-value activities.
JAXA’s robot features four arms and a reconfigurable base that can stabilize itself by grabbing onto surfaces like ISS rails, enabling it to crawl like a spider in zero gravity. Unlike terrestrial robots, which account for gravity in their control systems, the zero-gravity environment required Pick
Tags
roboticsspace-roboticsJAXAMoveIt-Promulti-armed-robotISS-automationrobotic-manipulation