Robot with AI vision and 4,000-Newton grip targets marine pollution
Source: interestingengineering
Author: @IntEngineering
Published: 9/17/2025
To read the full content, please visit the original article.
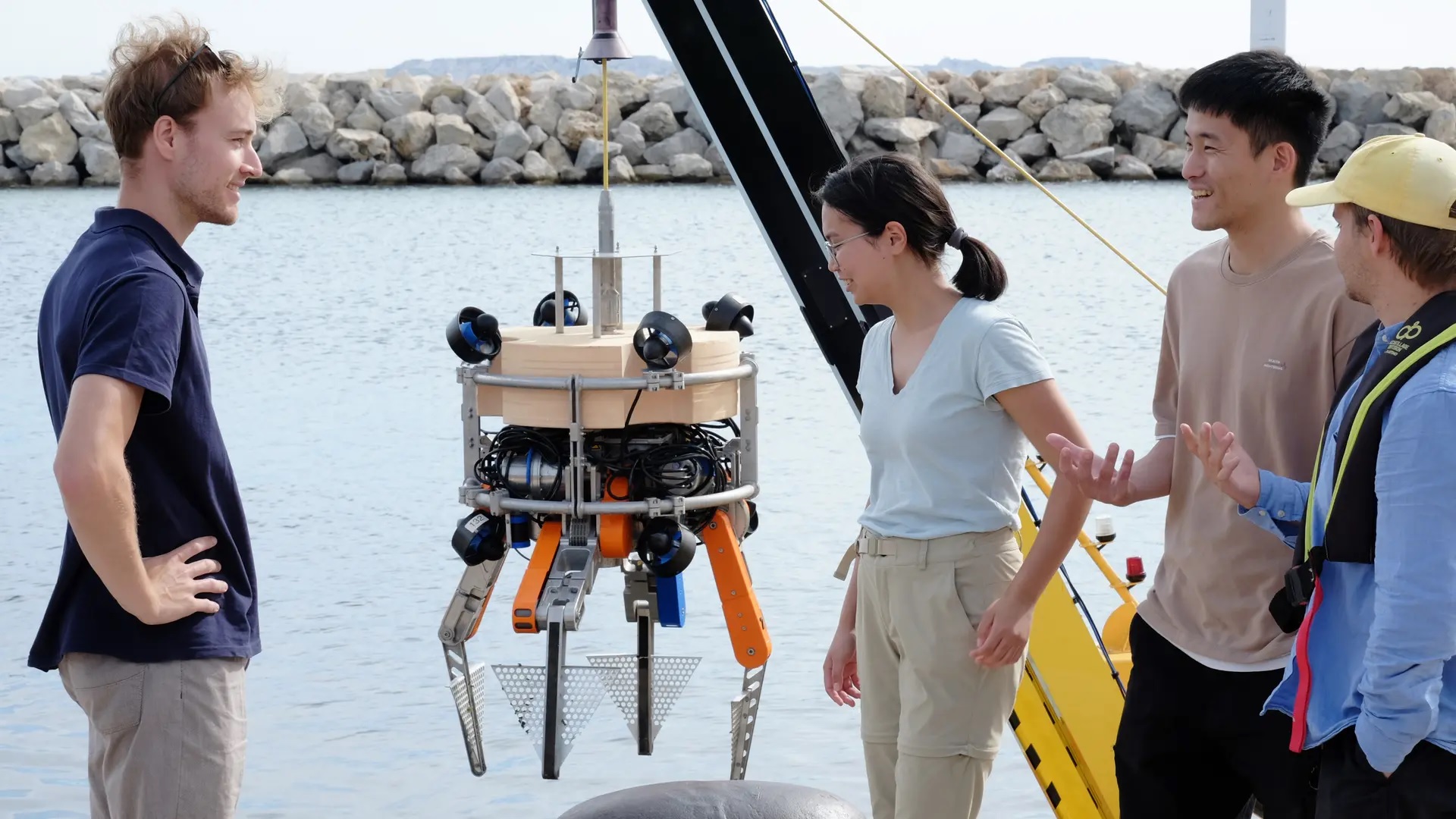
Read original articleGerman researchers at the Technical University of Munich (TUM) have developed an innovative AI-powered autonomous diving robot designed to combat marine pollution by collecting underwater debris. Tested in the port of Marseille, the robot integrates AI vision, ultrasound, and cameras to detect and identify various types of ocean litter, ranging from heavy objects like lost fishing nets and tires to fragile items such as glass bottles. The robot’s four-fingered robotic hand can exert a gripping force of up to 4,000 Newtons, enabling it to lift objects weighing as much as 551 lbs (250 kilograms) with precision, thanks to sensors that regulate grip strength to avoid damaging delicate waste.
The system is part of the EU project SEACLEAR and operates as a coordinated network including an unmanned service boat, a small underwater search robot, and an autonomous dinghy that serves as a floating waste container. The service boat supplies power and data via cable and uses ultrasonic waves to map the seabed. The 20-inch search robot
Tags
roboticsAI-visionunderwater-robotmarine-pollutionautonomous-systemsrobotic-gripperenvironmental-technology