US scientists control humanoid robot in real time like black magic
Source: interestingengineering
Author: @IntEngineering
Published: 7/21/2025
To read the full content, please visit the original article.
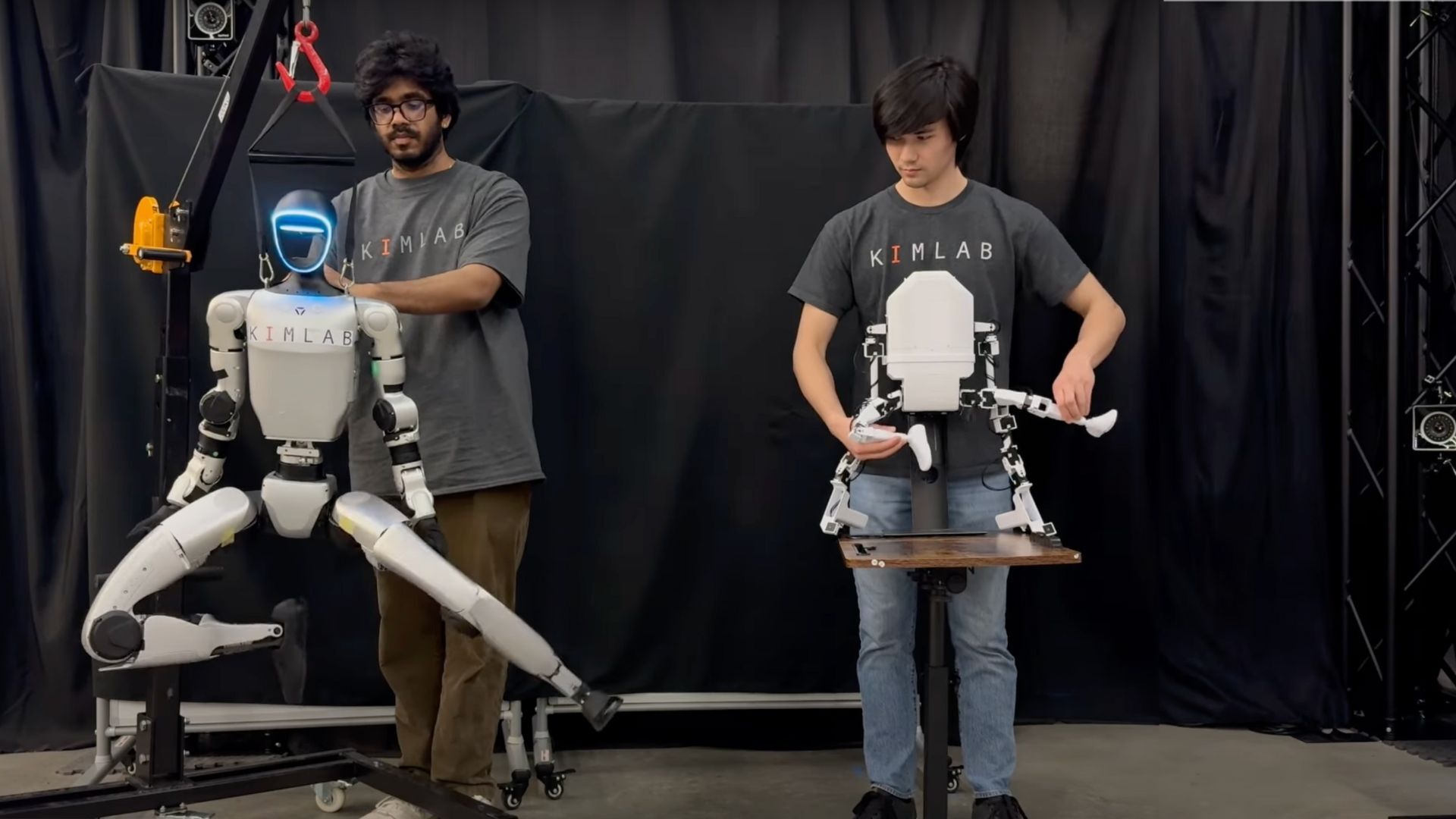
Read original articleResearchers at KIMLAB have developed PARPLE (Plug-and-Play Robotic Limb Environment), a modular platform that enables real-time control of robotic arms mimicking human arm movements. PARPLE integrates various robotic limbs ("followers") with diverse control devices ("leaders") such as gaming controllers, puppeteers, and VR interfaces. The system supports flexible configurations, allowing users to switch between joint-space control (one-to-one joint mapping) when leader and follower kinematics match, and task-space control (mapping end-effector poses) when they differ. It also provides real-time force feedback to enhance precision and user awareness, with intrinsic feedback helping maintain comfortable device positions and extrinsic feedback signaling physical constraints or obstacles encountered by the robotic limb.
At the core of PARPLE is PAPRAS, a modular robotic arm that can be mounted and reconfigured without altering the control setup, facilitating testing across different robot forms. The leader devices are pluggable and share mounting interfaces with PAPRAS, enabling easy interchangeability and
Tags
roboticshumanoid-robotteleoperationmodular-robotic-armsreal-time-controlVR-interfacesrobotic-limbs