JAXA thử nghiệm phần mềm MoveIt Pro của PickNik trên hệ thống robot nhiều cánh tay cho ISS - The Robot Report
Nguồn: roboticsbusinessreview
Tác giả: @therobotreport
Ngày đăng: 9/7/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
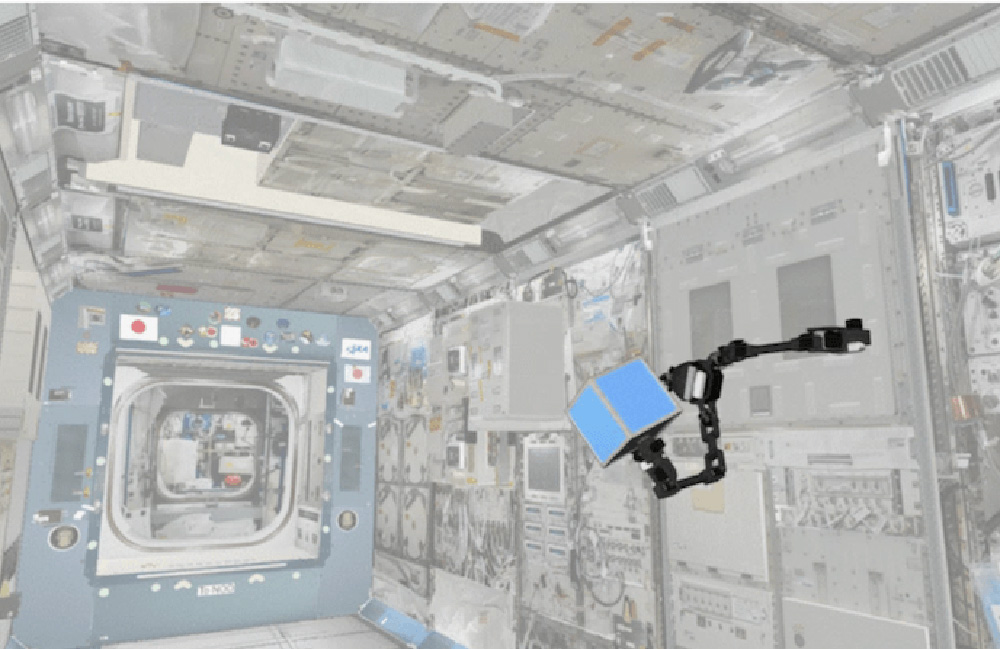
Đọc bài viết gốcPickNik Robotics đã hợp tác với Cơ quan Thám hiểm Hàng không Vũ trụ Nhật Bản (JAXA) để thử nghiệm phần mềm MoveIt Pro như nền tảng lập kế hoạch và điều khiển cho hệ thống robot đa chi của JAXA trong khuôn khổ sáng kiến Hệ thống Robot Tổ chức và Vận chuyển Tải trọng (PORTRS). Mục tiêu là chứng minh một hệ thống robot phức tạp có khả năng thực hiện các nhiệm vụ thao tác trong môi trường vi trọng lực trên Trạm Vũ trụ Quốc tế (ISS), chẳng hạn như bò, thay đổi tải trọng và xử lý các túi chuyển hàng linh hoạt. Những nhiệm vụ này, thường là bảo trì định kỳ hoặc xử lý hàng hóa, tốn nhiều thời gian của các phi hành gia, trong khi thời gian của họ có giá trị cực kỳ cao—lên đến 200.000 đô la mỗi giờ—điều này làm nổi bật lợi tức đầu tư đáng kể khi sử dụng trợ giúp robot để hỗ trợ phi hành gia và giải phóng họ cho các hoạt động có giá trị cao hơn.
Robot của JAXA có bốn cánh tay và một nền tảng có thể tái cấu hình, có khả năng tự ổn định bằng cách bám vào các bề mặt như thanh ray trên ISS, cho phép nó bò như một con nhện trong môi trường không trọng lực. Khác với các robot trên mặt đất, vốn phải tính đến trọng lực trong hệ thống điều khiển của mình, môi trường không trọng lực đã yêu cầu PickNik...
Thẻ
roboticsspace-roboticsJAXAMoveIt-Promulti-armed-robotISS-automationrobotic-manipulation