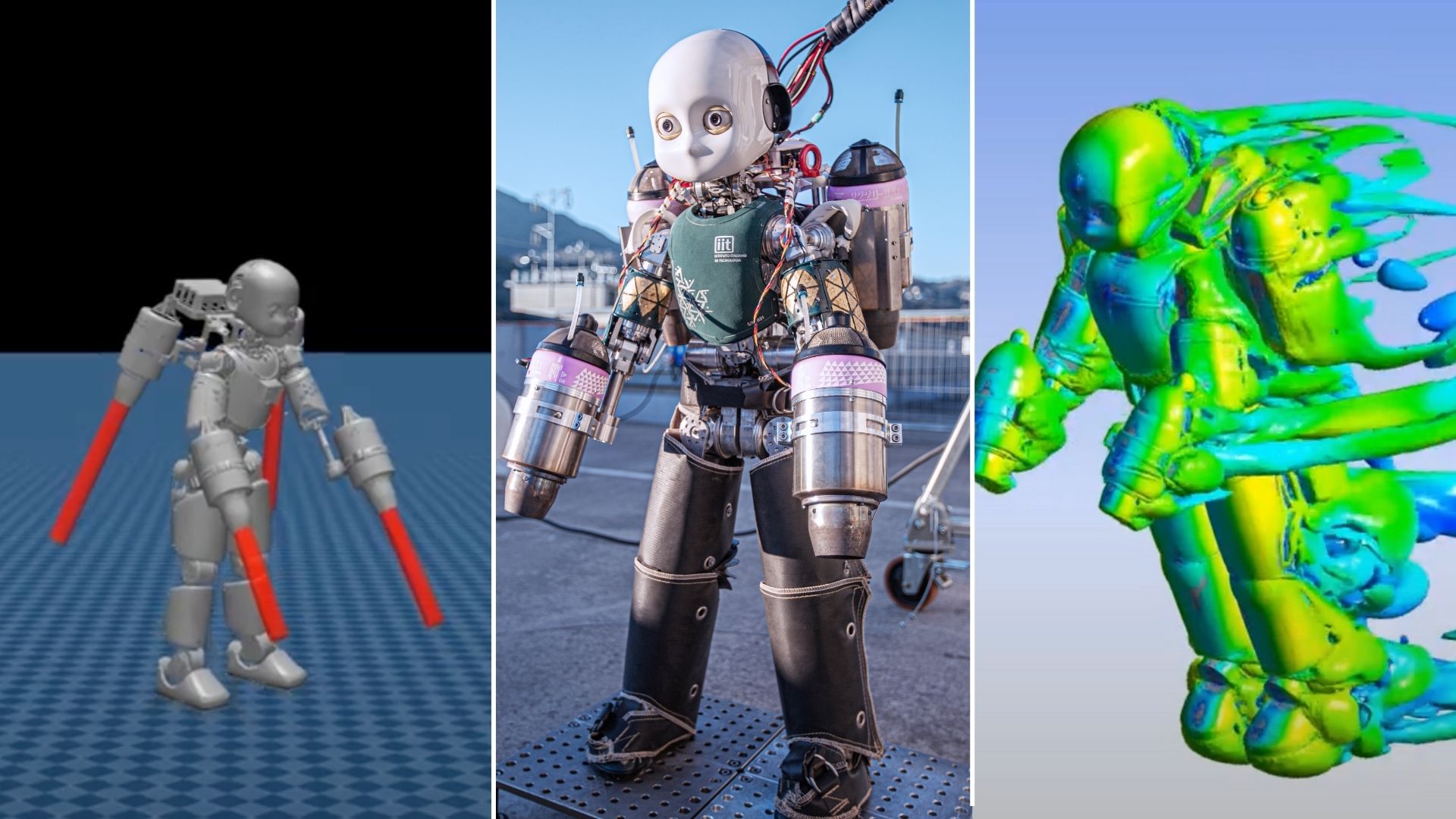
Robot em bé chạy bằng động cơ phản lực thể hiện khả năng điều khiển bay vững chắc trong các mô phỏng
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 1/10/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
Đọc bài viết gốcBài báo thảo luận về một bước tiến quan trọng trong điều khiển bay cho robot người chạy bằng động cơ phản lực iRonCub, được phát triển bởi các nhà nghiên cứu tại Viện Công nghệ Ý. Nhóm nghiên cứu đã giới thiệu một khung điều khiển Dự đoán Mô hình (MPC) mới tích hợp cả bộ truyền động khớp nhanh của robot và động lực học động cơ phản lực chậm hơn thông qua thiết kế điều khiển đa tốc độ. Phương pháp này sử dụng mô hình động lượng trọng tâm tuyến tính hóa cho động lực học bay kết hợp với mô hình phi tuyến cho động cơ phản lực, cho phép bộ điều khiển phát lệnh với tần số phù hợp với khả năng vật lý của từng bộ truyền động. Các mô phỏng trên MuJoCo đã chứng minh khả năng duy trì bay ổn định của robot, phục hồi sau các tác động như đẩy gây lật mũi và lật ngang, đồng thời theo dõi chính xác cả các quỹ đạo bay mượt mà và mạnh mẽ.
Nghiên cứu này đánh dấu một bước tiến trong việc kết hợp robot đi bộ với khả năng di chuyển trên không, với nền tảng iRonCub3 gần đây đã đạt được khả năng cất cánh trong phòng thí nghiệm bằng cách bay lơ lửng khoảng 50 centimet sử dụng bốn động cơ phản lực. Khung MPC đa tốc độ hợp nhất không chỉ cải thiện khả năng phản hồi và ổn định bằng cách tích hợp trực tiếp động lực học động cơ phản lực...
Thẻ
roboticshumanoid-robotjet-propulsionflight-controlmodel-predictive-controlsimulationautonomous-systems