Robot với thị giác AI và lực kẹp 4.000 Newton nhắm vào ô nhiễm biển
Nguồn: interestingengineering
Tác giả: @IntEngineering
Ngày đăng: 17/9/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
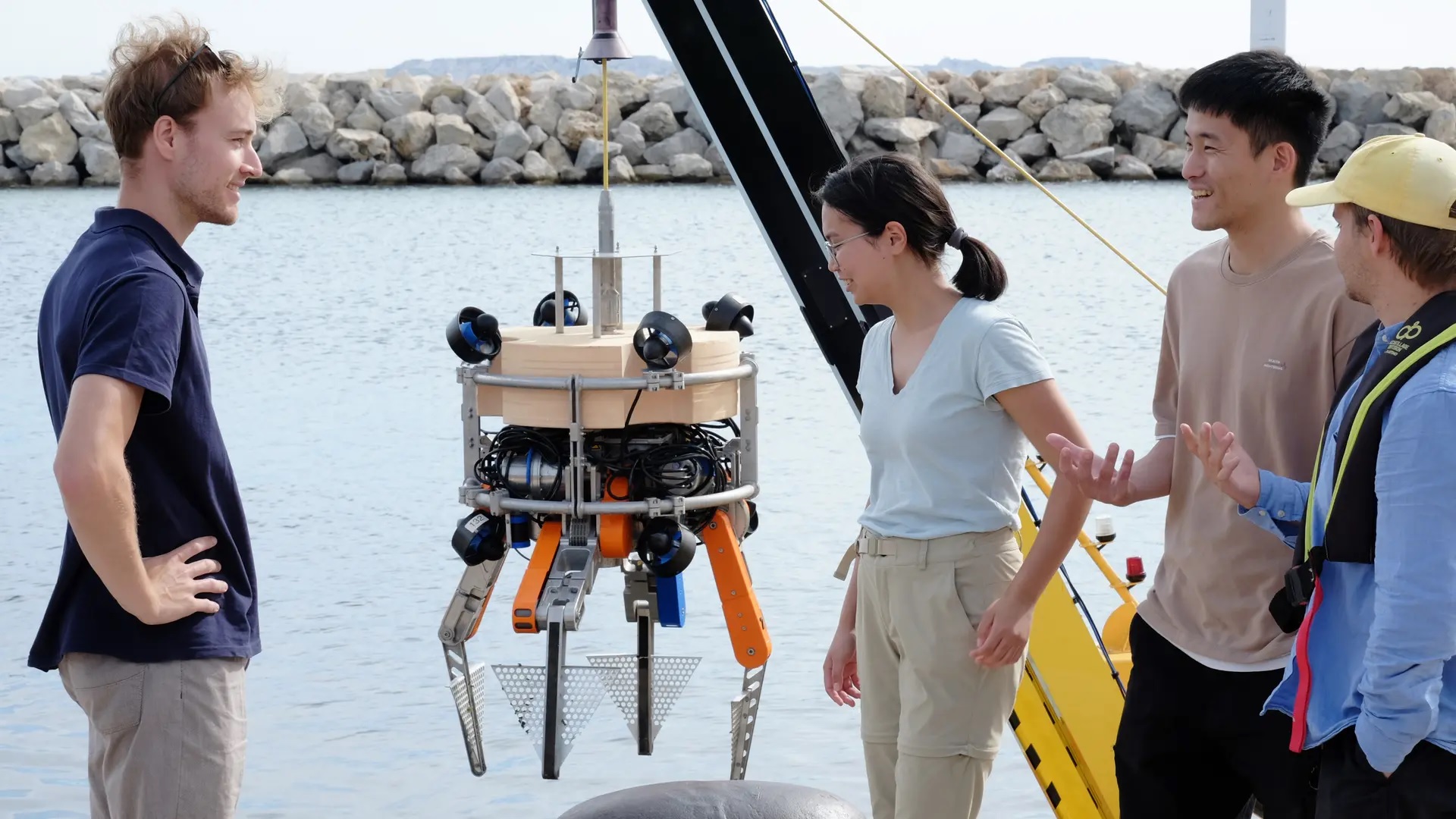
Đọc bài viết gốcCác nhà nghiên cứu Đức tại Đại học Kỹ thuật Munich (TUM) đã phát triển một robot lặn tự động tiên tiến được trang bị trí tuệ nhân tạo, nhằm chống lại ô nhiễm biển bằng cách thu thập rác thải dưới nước. Được thử nghiệm tại cảng Marseille, robot này tích hợp công nghệ thị giác AI, siêu âm và camera để phát hiện và nhận dạng nhiều loại rác biển khác nhau, từ các vật thể nặng như lưới đánh cá bị mất và lốp xe đến những vật phẩm dễ vỡ như chai thủy tinh. Bàn tay robot bốn ngón của nó có thể tạo lực kẹp lên đến 4.000 Newton, cho phép nâng các vật nặng tới 551 lbs (250 kilogram) một cách chính xác, nhờ các cảm biến điều chỉnh lực kẹp để tránh làm hỏng những vật liệu rác thải mỏng manh.
Hệ thống này là một phần của dự án SEACLEAR của Liên minh châu Âu và hoạt động như một mạng lưới phối hợp bao gồm một tàu dịch vụ không người lái, một robot tìm kiếm dưới nước nhỏ và một thuyền tự động phục vụ như thùng chứa rác nổi. Tàu dịch vụ cung cấp điện và dữ liệu qua cáp và sử dụng sóng siêu âm để lập bản đồ đáy biển. Robot tìm kiếm dài 20 inch...
Thẻ
roboticsAI-visionunderwater-robotmarine-pollutionautonomous-systemsrobotic-gripperenvironmental-technology