TRI: các mô hình hành vi lớn được huấn luyện trước tăng tốc học tập của robot
Nguồn: roboticsbusinessreview
Tác giả: @therobotreport
Ngày đăng: 11/7/2025
Để đọc nội dung đầy đủ, vui lòng truy cập vào bài viết gốc.
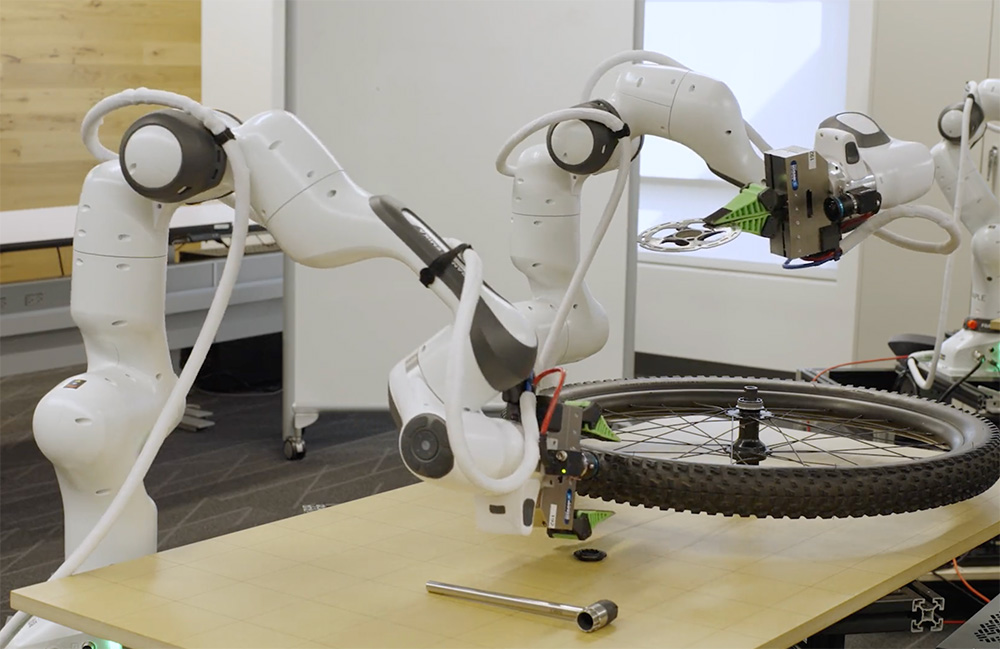
Đọc bài viết gốcViện Nghiên cứu Toyota (TRI) đã thúc đẩy phát triển các Mô hình Hành vi Lớn (LBMs) nhằm tăng tốc quá trình học tập của robot, chứng minh rằng một LBM được tiền huấn luyện duy nhất có thể học hàng trăm nhiệm vụ và tiếp thu kỹ năng mới với lượng dữ liệu huấn luyện giảm tới 80%. LBMs được huấn luyện trên các bộ dữ liệu lớn và đa dạng về thao tác robot, cho phép các robot đa năng thực hiện các hành vi phức tạp, kéo dài như lắp đặt rotor xe đạp. Nghiên cứu của TRI bao gồm việc huấn luyện các LBM dựa trên khuếch tán với gần 1.700 giờ dữ liệu robot và tiến hành hàng nghìn lần thử nghiệm thực tế và mô phỏng, cho thấy LBMs luôn vượt trội hơn các chính sách được huấn luyện từ đầu, yêu cầu ít dữ liệu hơn 3-5 lần cho các nhiệm vụ mới, và cải thiện liên tục khi có thêm dữ liệu tiền huấn luyện.
LBMs của TRI sử dụng kiến trúc biến đổi khuếch tán với các bộ mã hóa thị giác-ngôn ngữ đa phương thức và đầu khử nhiễu biến đổi, xử lý đầu vào từ camera cổ tay và cảnh vật, cảm nhận nội tại, cùng các lệnh ngôn ngữ để dự đoán các chuỗi hành động ngắn. Dữ liệu huấn luyện kết hợp dữ liệu điều khiển từ xa thực tế,
Thẻ
roboticslarge-behavior-modelsrobot-learningpretrained-modelsToyota-Research-Instituteautonomous-robotsembodied-AI